Weijie Zhou
About Me
I am a third-year Ph.D. student jointly trained by Beijing Jiaotong University (BJTU) and the Institute of Automation, Chinese Academy of Sciences (CASIA), advised by Prof. Jinqiao Wang, Prof. Honghui Dong, and Dr. Chaoyang Zhao. I am currently a Research Intern at Tencent Robotics X Lab under Tencent Project UP (青云计划), supervised by Dr. Zhengyou Zhang.
My research focuses on Embodied Foundation Models and World Models, especially spatial reasoning, embodied cognition, and physical intelligence for robotic perception, planning, and long-horizon interaction.
News
-
[2026.04] 🤖 Primarily led the training of HY-Embodied-0.5-X; GitHub Ranked No.1 on 7/10 embodied benchmarks among edge-size models. - [2026.03] 🚀 Selected for the elite Tencent “Project UP” (腾讯青云计划).
- [2025.12] 🏆 Awarded the Outstanding Intern (2025 H2) at Tencent Robotics X Lab.
- [2025.09] 🎉 One paper (PhysVLM-AVR) accepted to NeurIPS 2025.
- [2025.08] 📄 Released technical report TAIROS with Tencent Robotics X Lab.
- [2025.07] 🏆 Awarded the Outstanding Intern (2025 H1) at Tencent Robotics X Lab.
- [2025.06] 🎉 One paper (LightPlanner) accepted to IROS 2025.
- [2025.02] 🎉 One paper (PhysVLM) accepted to CVPR 2025.
Recent Publications
-
 NeurIPS 2025
39th Conference on Neural Information Processing Systems (NeurIPS), 2025
NeurIPS 2025
39th Conference on Neural Information Processing Systems (NeurIPS), 2025 -
 Tencent Robotics X Lab
Tencent Robotics X Lab Tech Report, 2025PDF Project Page Released
Tencent Robotics X Lab
Tencent Robotics X Lab Tech Report, 2025PDF Project Page Released -
 IROS 2025
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
IROS 2025
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 -
 CVPR 2025
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
CVPR 2025
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
Other Publications
- Weijie Zhou, Zijun Wang, Minshu Zhang, Liwen Wang. Wind turbine actual defects detection based on visible and infrared image fusion. IEEE TIM, 2023.
Research Highlights
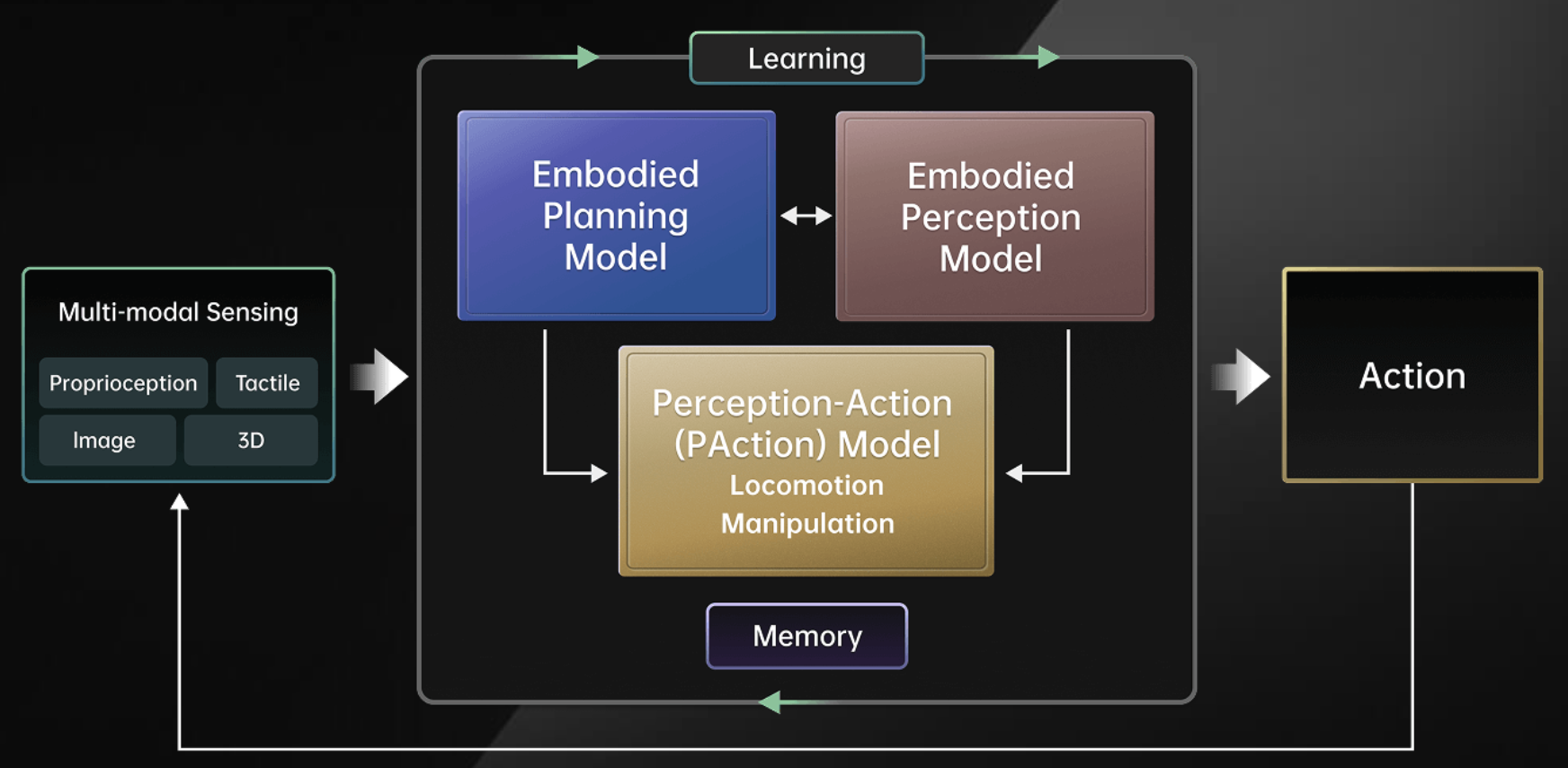
- HY-Embodied-0.5-X: Primarily led the training of an open-source embodied foundation model (Hugging Face, GitHub), including the “prior validation -> progressive scaling -> full-scale training” recipe and standardized reconstruction of heterogeneous embodied data.
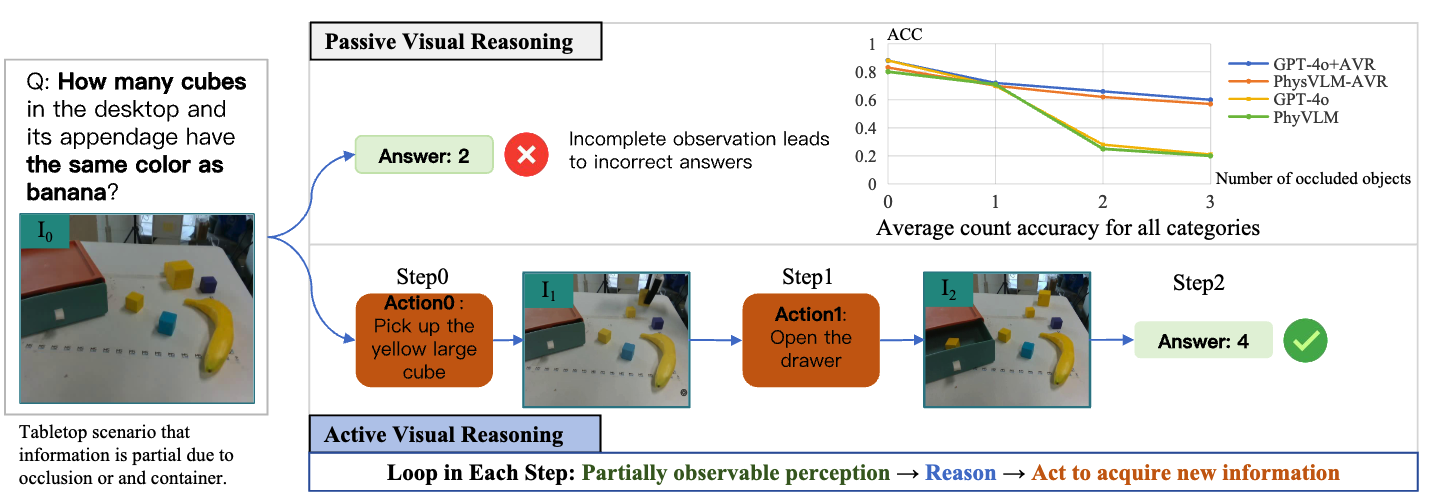
- Active Visual Reasoning for Embodied VLMs: Proposed a multi-round “perceive -> reason -> imagine -> act” paradigm with GRPO-based training, improving visual understanding and spatial reasoning on embodied planning benchmarks.
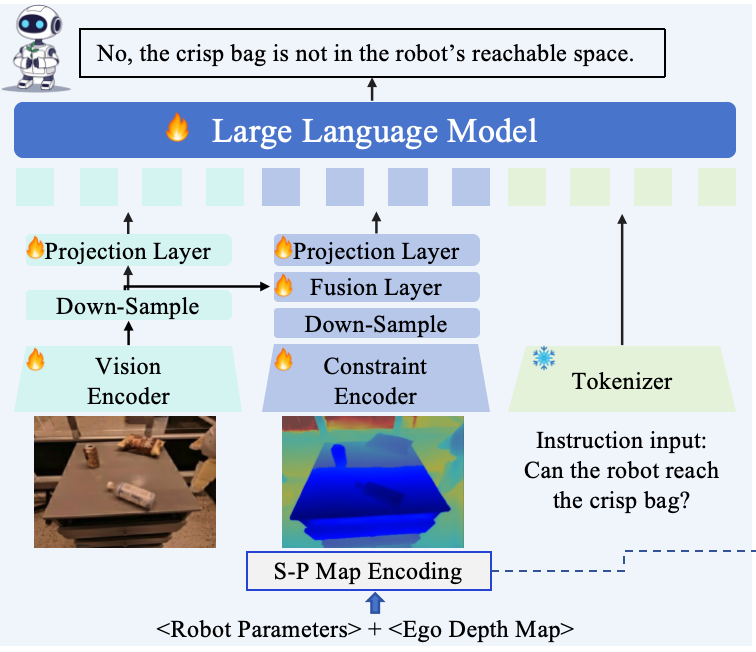
- Physically Grounded VLMs: Introduced robotic reachability as a visual representation in PhysVLM, improving physical affordance reasoning while preserving general scene understanding.
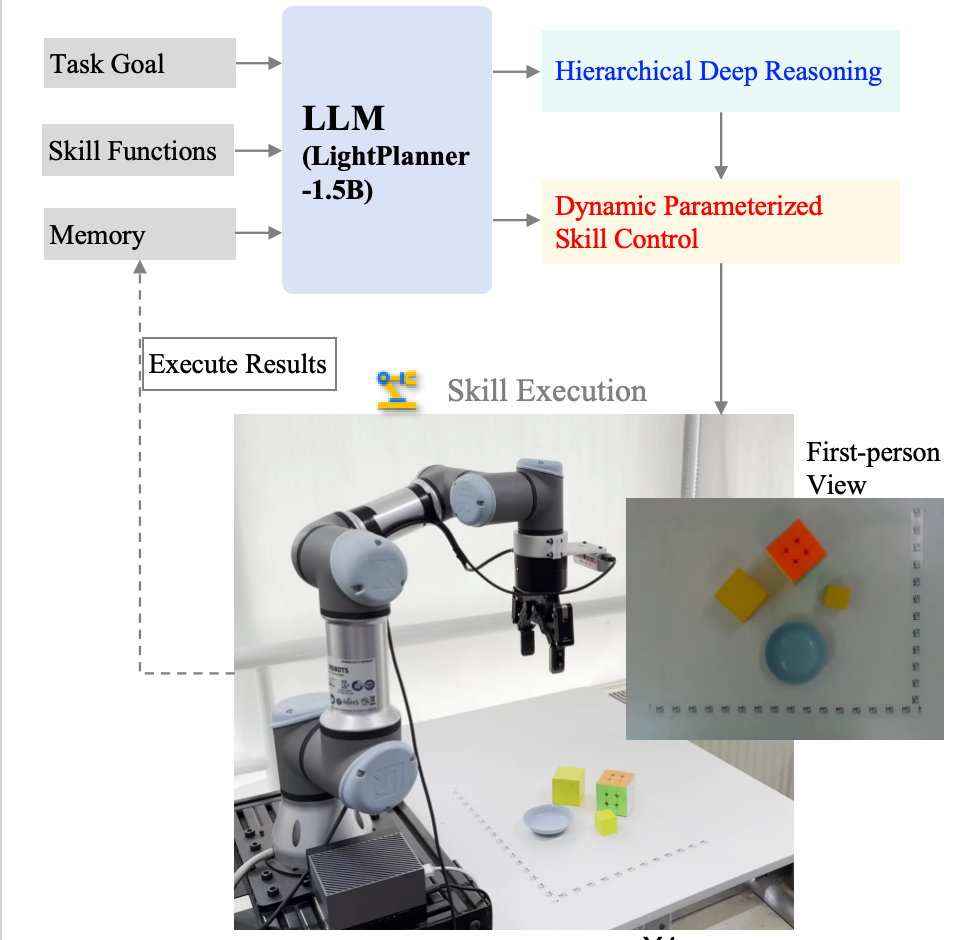
- Closed-loop Task Planning: Developed LightPlanner, a feedback-driven planning framework with dynamic skill parameterization and memory, for robust long-horizon embodied task execution.
Experience
Tencent Robotics X Lab (Project UP), Shenzhen | March 2026 – Present
- Research on embodied foundation models, world models, and large-scale multimodal training for real-world robotic agents.
Tencent Robotics X Lab, Shenzhen | March 2025 – October 2025
- TAIROS AI Platform: Co-developed an embodied AI platform for robotics applications, deployed at 4+ offline events including the 2025 World AI Conference.
- Multi-Agent Shared Memory Reasoning: Designed a streaming perception and on-demand reconstruction memory system enabling multi-agent long-horizon reasoning without pre-built maps.
CASIA Foundation Model Research Center, Beijing | November 2024 – March 2025
- Teleoperation + UMI Data Collection System: Led the system architecture and hardware-software integration for a dual-use teleoperation and data collection platform, achieving 1.5 mm RMS positioning error, end-to-end latency under 100 ms, and deployment across 3 institutions.
Selected Awards
- Outstanding Intern (2025 H2), Tencent Robotics X Lab, 2025.
- Outstanding Intern (2025 H1), Tencent Robotics X Lab, 2025.
- Academic Scholarship and Merit Student, Beijing Jiaotong University, 2025.
- 3rd Place, Zhongguancun Bionic Robot Competition, Embodied Large Model Track, 2024.
- Kaggle Silver Medal, 2022.